Replastify
A compact, all-in-one plastic recycling system, designed as an end-effector for a KUKA robotic arm. PET bottles go in one end, get shredded into flakes, melt, and come out the other end as a finished extruded object. One closed loop, no transport between steps, no separate machines.
The problem
The numbers don't move. Around 79% of the plastic ever made has ended up in landfills or the environment. 12% has been burned. Only about 9% has actually been recycled. Around 8 million metric tons enter the oceans every year. The standard recycling pipeline is long, it moves material across cities, and it isn't seeing the volume it would need to in order to bend those numbers.
The starting question was simple. What if the whole pipeline collapsed into one machine, sitting where the waste already is, and the recycled output came out as an actually useful object rather than a pellet someone still has to transport, melt, and reshape somewhere else?
The system
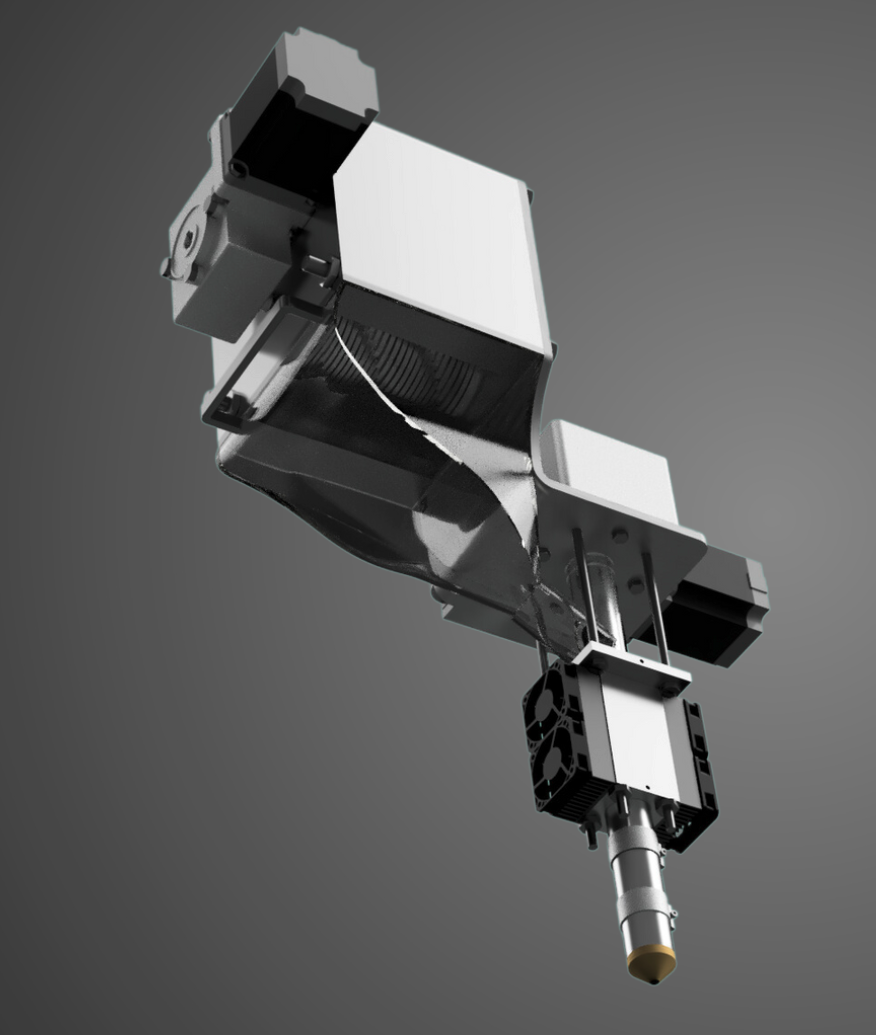
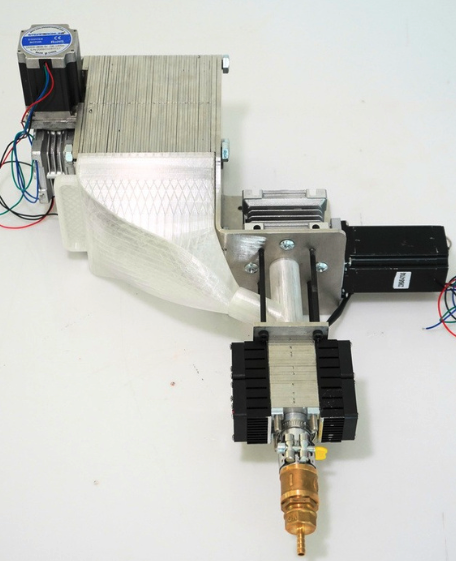
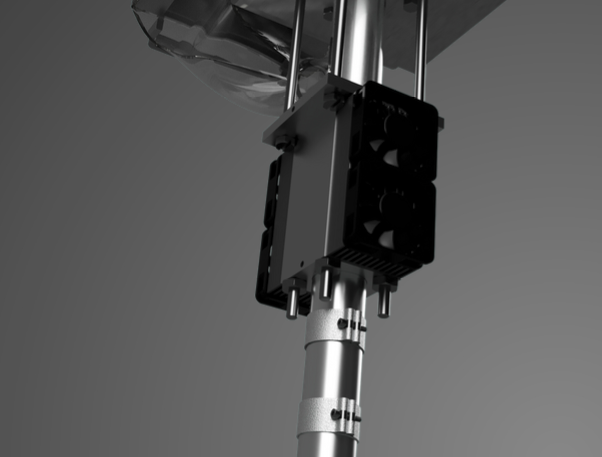
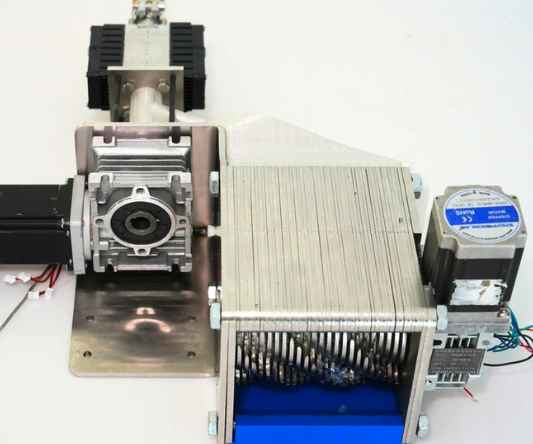
Replastify is one unit, not a line. We mounted everything as an end-effector on a KUKA robotic arm so the same hardware that ingests a bottle also draws the final shape with precision. Three stages, all happening on the arm:
-
01
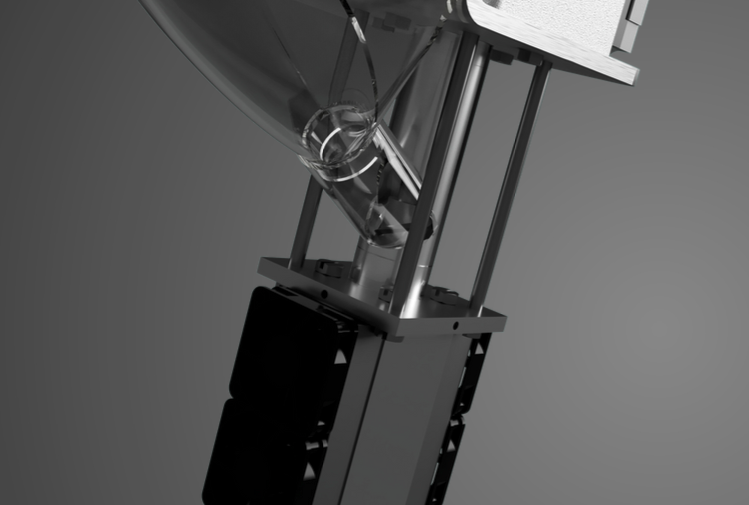
Air-pressure bottle feed
PET bottles travel through a pneumatic pipeline that keeps feeding continuously, so the shredder never starves and the whole cycle stays running.
-
02
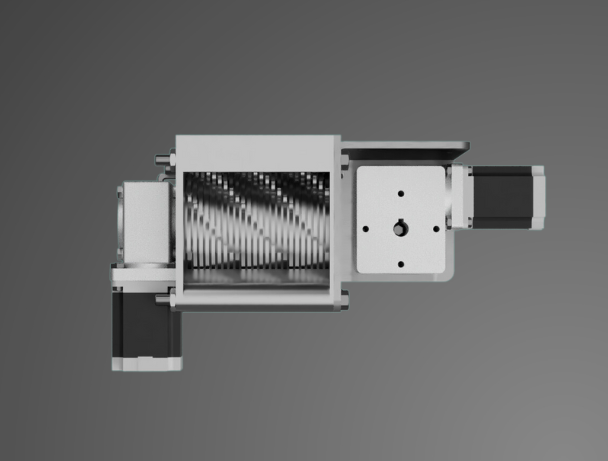
Shredder + flake screen
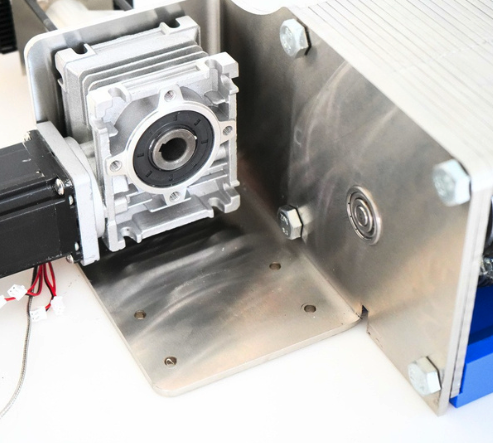
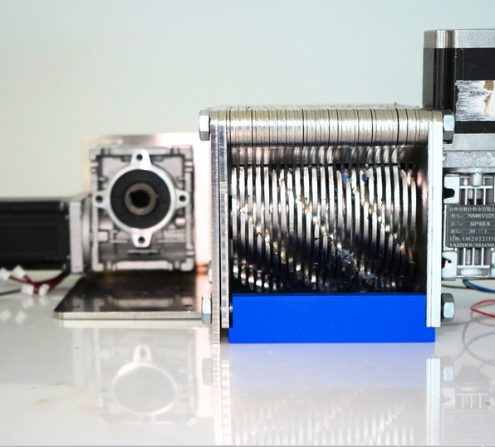
A stepper-motor-driven shredder with a 14 mm shaft and block flange bearings reduces each bottle to flakes under 10 mm². An adjustable screen sieves anything bigger back into the shredder for another pass.
-
03
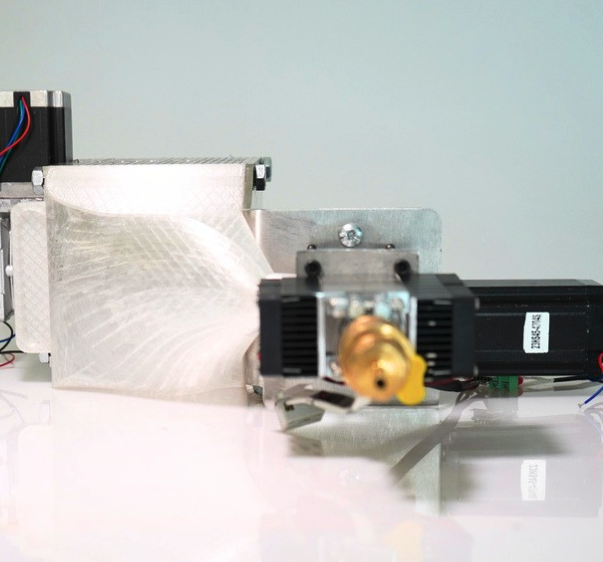
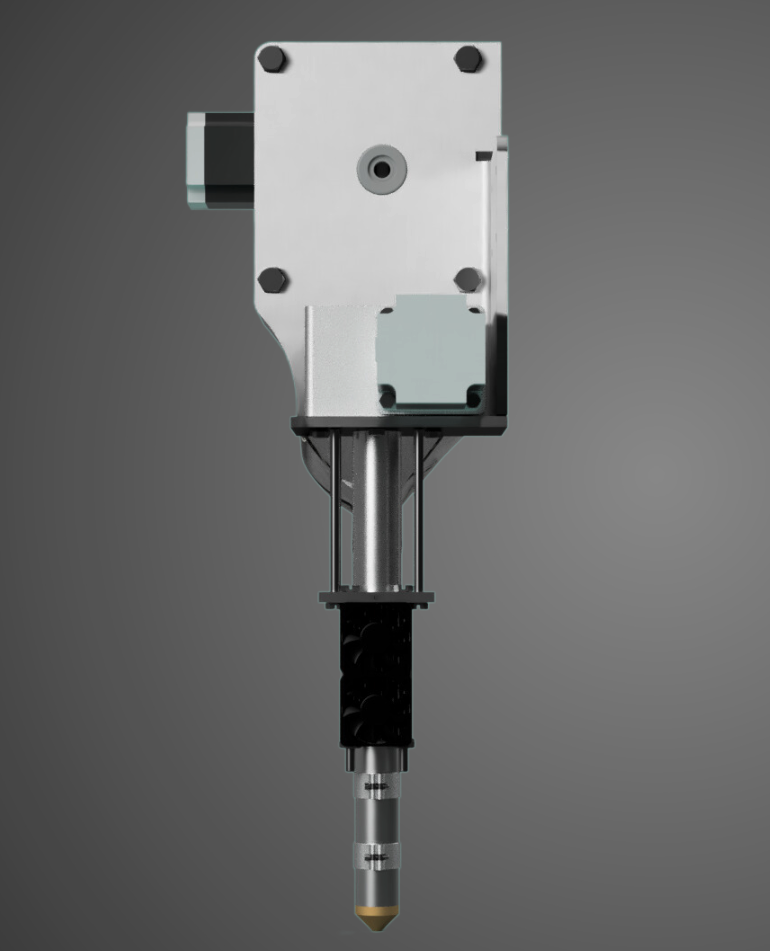
Heated auger extruder
Flakes drop straight into a 304 stainless steel barrel wrapped in 25 mm heat bands. A 20×300 mm auger, pushed by a second stepper, drives the molten plastic through a 3 mm nozzle. A 50 mm 24 V fan and heatsink hold the cold end stable.
The arm gives us what a standard 3D printer can't: the freedom to extrude in space, on-site, on-demand. Bottles go in, intricate shapes come out. No pellet stage, no shipping, no separate manufacturing line.
A group project for PrS301 at DIDI, with Jeeda Sabbagh and Aya Al Atrash. I led the mechanical architecture and the extruder iterations.
The flow, end to end
Bottle in. Pneumatic feed pushes it down to the shredder. Blades cut it to flakes. The flakes drop into the heated barrel. The auger turns. Molten PET comes out of the nozzle. The KUKA arm is already moving along the path of the object it's been told to build. The piece grows on a heated bed underneath. When the bottle is gone, the next one is already on its way through the pipeline.
Nothing in this is novel on its own. Shredders exist. Extruders exist. Robotic arms do additive work all the time. The contribution is the integration: one tool that doesn't break the loop between waste and product.

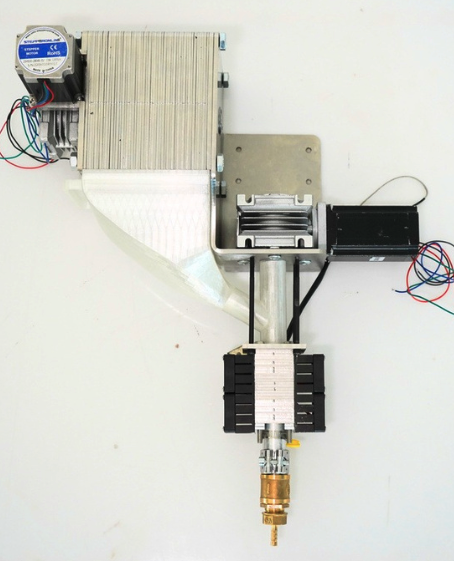
Outcome
We delivered a working bench model of the end-effector, a full documentation set, and a process video showing PET going in and shaped output coming out. The system produced its first set of intricate test prints, and the architecture is documented well enough that a second build could pick it up without a phone call.
The bigger thing this proves is at the system level. Recycling loops break when they cross too many handoffs. Putting the whole loop on a robot arm doesn't fix every problem with plastic, but it collapses three of them into one moving point of contact.